销售咨询热线:
18911365393
夏克哈特曼波前传感器(Shack-HartmannWavefront Sensor, SHWFS)是一种基于子光束分割的波前探测设备,其核心原理是通过微透镜阵列将入射波前分割为大量子光束,每个子光束经微透镜聚焦后在探测器(如 CCD、CMOS)上形成光斑;通过测量光斑相对于无畸变时的偏移量,可反推原始波前的畸变形态(基于几何光学中 “波前斜率与光斑偏移成正比" 的关系)。这种原理使其在实时性、空间分辨率和结构稳定性上具有显著优势,因此在天文望远镜中被广泛用于波前畸变探测,是自适应光学(Adaptive Optics, AO)系统的核心部件。
一、在天文望远镜中的应用
天文观测中,大气湍流、望远镜光学系统自身像差(如加工误差、重力变形)等会导致波前畸变,严重降低成像分辨率(地面望远镜受大气湍流影响,实际分辨率常仅为 1-2 角秒,远低于衍射极限)。SHWFS 的核心作用是为这些畸变提供实时、高精度的量化数据,支撑 AO 系统实现动态校正,具体应用可分为以下几类:
1. 大气湍流实时校正(自适应光学系统核心)
大气湍流是地面天文望远镜成像的主要限制因素,其导致的波前畸变具有动态性(变化周期1-100 毫秒) 和空间随机性。SHWFS 通过以下方式支撑校正:
当目标天体(或激光导星)的光进入望远镜后,SHWFS 实时探测其波前畸变的斜率分布(每个微透镜对应一个子区域的斜率);
探测数据经算法(如区域法、模式法)重构为完整波前畸变;
控制变形镜(Deformable Mirror)产生反向畸变,抵消大气湍流影响,使成像分辨率接近望远镜衍射极限(如 8 米级望远镜可达到 0.1 角秒以下)。
例如,欧洲南方天文台(ESO)的甚大望远镜(VLT)、美国凯克望远镜的 AO 系统均以 SHWFS 为核心探测器,使其在红外波段的成像分辨率提升 10-100 倍。
2. 望远镜光学系统像差检测与校准
天文望远镜的光学元件(主镜、次镜、校正镜等)在加工、安装或运行中会产生静态 / 慢变像差(如球差、彗差、像散),需通过 SHWFS 进行**表征:
对望远镜进行 “闭环校准" 时,使用点光源(如恒星、激光导星)作为参考,SHWFS 探测光学系统自身引入的波前畸变;
基于探测结果调整光学元件(如通过促动器微调主镜姿态),或通过变形镜预加载反向像差,抵消系统固有误差。
例如,詹姆斯・韦伯空间望远镜(JWST)在入轨后,通过 SHWFS(其波前传感系统基于类似原理)检测主镜拼接误差,并通过促动器调整镜片位置,*终将波前误差控制在纳米级。
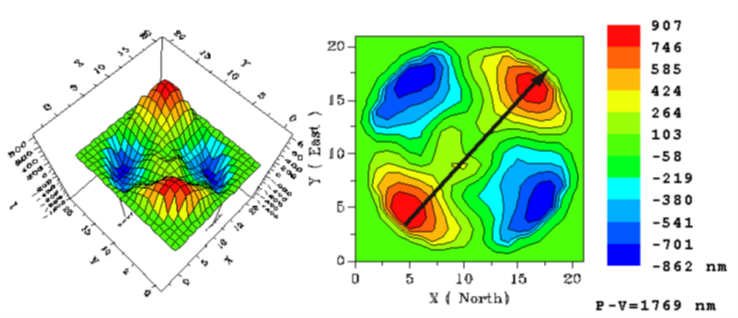
It had an orientation of 45 degrees, and wascaused by the support errors.
3. 激光导星系统的波前探测
当观测目标天体较暗(无法提供足够光强用于波前探测)时,天文望远镜会采用激光导星(LaserGuide Star, LGS) 技术:向大气平流层发射激光(通常为钠激光,激发钠层原子发光),形成人工 “参考星"。SHWFS 此时的作用是:
探测激光导星的波前畸变(反映其路径上的大气湍流);
结合自然导星(用于校正激光导星的 “锥度误差")数据,实现对目标天体的间接校正。
例如,美国双子座望远镜的 “Gemini South Adaptive OpticsSystem" 采用 SHWFS 配合激光导星,使暗弱天体的成像质量提升至衍射极限。
4. 高分辨率光谱与成像辅助
在光谱观测中,波前畸变会导致光谱线展宽、信噪比下降。SHWFS 通过校正波前,可:
提高光谱仪的空间分辨率(如区分密近双星的光谱);
减少杂散光干扰,提升弱谱线的探测灵敏度。
二、技术特点(结合天文观测需求)
SHWFS 的技术设计需适配天文观测的特殊场景(如低光强、高动态、宽视场),其核心特点如下:
1. 高空间分辨率与波前细节探测能力
微透镜阵列设计:天文用 SHWFS 的微透镜数量通常为 100-10000 个(如 VLT 的 AO 系统用 2400 个微透镜),数量越多,可探测的波前空间频率越高(即能分辨更精细的畸变,如小尺度大气湍流)。
填充因子:微透镜阵列的 “填充因子"(有效透光面积占比)需尽可能高(通常 > 90%),以减少未探测的波前区域,避免信息丢失。
2. 高动态响应速度
大气湍流的时间尺度为毫秒级(典型变化周期 1-10 毫秒),因此 SHWFS 需具备高帧率探测能力:
探测器需支持高帧频(通常 100-1000Hz),如电子倍增 CCD(EMCCD)、科学 CMOS(sCMOS),可在低光强下快速采集子光斑图像;
数据处理延迟需 < 1 毫秒(如通过 FPGA 实时计算光斑偏移),确保 AO 系统闭环速度匹配湍流变化。
3. 宽动态范围与弱光适应性
动态范围:每个子光斑的**偏移量决定了 SHWFS 可探测的波前斜率上限(即 “动态范围")。天文观测中,强湍流可能导致大偏移,需通过设计微透镜焦距(焦距越长,相同斜率对应的偏移量越大,动态范围越小但灵敏度越高)平衡 —— 通常动态范围需覆盖 ±10-100 角秒(对应大气湍流的强畸变场景)。
弱光探测:暗弱天体或激光导星的光强极低(单光子级),因此 SHWFS 需具备高灵敏度:
探测器采用低噪声器件(如 EMCCD 的电子倍增增益可抑制读出噪声);
光斑定位算法优化(如高斯拟合、质心加权算法),减少光子噪声对偏移量测量的影响(定位精度可达 1/100 像素)。
4. 与多波段观测的兼容性
天文望远镜需覆盖可见光、红外等多波段,SHWFS 需适应不同波长:
微透镜阵列的材料(如石英、硅)需在目标波段有高透光率;
探测器的光谱响应需匹配(如红外波段用 HgCdTe 探测器)。
5. 结构稳定性与环境适应性
地面望远镜需抵抗温度变化、机械振动对微透镜阵列与探测器相对位置的影响(偏移会导致 “零位误差",即无畸变时光斑偏移),因此需采用恒温控制、刚性支撑结构;
空间望远镜(如 JWST)的 SHWFS 需耐受真空、辐射环境,元件材料需具备抗辐射性(如石英微透镜)。
6.关键问题
夏克哈特曼波前传感器(Shack-Hartmann Wavefront Sensor, SHWFS系统与干涉测量法相比有何优势,两者结果一致性如何?
优势:SHWFS系统更紧凑、坚固,适合露天望远镜环境;可同时提取像差、支撑误差和气流信息。一致性:早期研究表明,SHWFS分析与干涉测量结果高度一致,是可靠的替代方法。
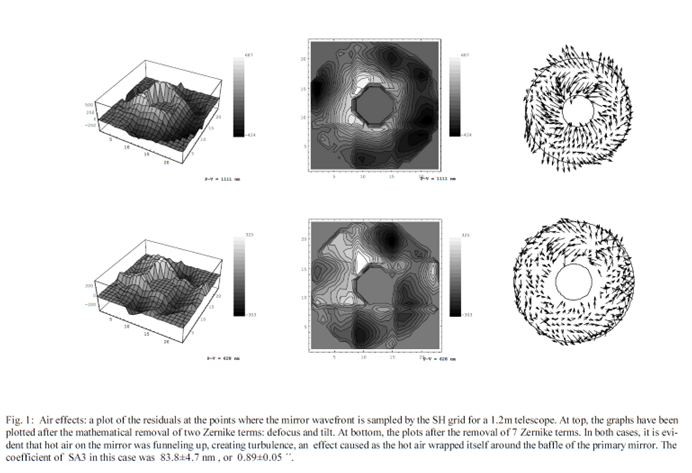
夏克哈特曼波前传感器系统如何处理空气效应对测量的影响?
外部空气效应(随机):通过 > 30s 曝光时间积分平均,使 SHWFS光斑呈圆形,不影响分析;
内部空气效应(如圆顶热气流):会增加噪声,但通过残差分析可判断圆顶条件,且仍能可靠估计 Zernike 系数(如三阶球差在不同气流场景下误差稳定在 ±0.05´´)。
如何利用夏克哈特曼波前传感器系统识别望远镜的支撑问题?
步骤:先通过软件减去离焦、倾斜、彗差等 7 项低阶像差的贡献,再观察剩余波前图 / 等高线图,支撑结构(如 12 个支撑点)会以残差形式显现;同时,支撑问题会伴随高像散、三角彗差等系数(如 1.5m 镜面像散达 2.76´´)。
总结
夏克哈特曼波前传感器凭借高实时性、高空间分辨率、宽动态范围的技术特点,成为天文望远镜(尤其是地面望远镜)自适应光学系统的核心部件,支撑了大气湍流校正、光学系统校准、激光导星探测等关键任务,是突破观测分辨率极限的 “眼睛"。其技术发展方向(如更大规模微透镜阵列、更高灵敏度探测器、多波段兼容设计)将进一步推动天文观测向更高分辨率、更深空探测迈进。
推荐产品:
夏克哈特曼波前传感器(天文望远镜用)
光热弱吸收测试仪
Shack-Hartmann夏克-哈特曼传感器/UV波前传感器
EUV/DUV极紫外/深紫外波前传感器/ Shack-Hartmann夏克-哈特曼传感器
UV/VIS激光光束质量分析仪
高功率激光光束分析仪



